
Oschatz / Wolf / Wollin
Gutleutstraße 96
60329 Frankfurt am Main
++49 69 2 40 00 30
digitalinteriors@meso.net
Related Entities
- Project: Real-Time Robotic Motion Library
- Date: September 2011
- Client: BMW AG, Munich
- Contractor: BMW AG, Munich
On behalf of BMW, MESO researched and developed the basis for a platform for interactive exhibits. One of the main components in the first stage of the project is the Real-Time Robotic Motion Library (RT/RML). This enables highly aesthetic sequences of movements to be implemented by ABB industrial robots in any kind of programming environment.
Industrial robots have traditionally been controlled by a fixed program which lets them work as efficiently as possible. The robot typically works self-sufficiently and is linked to the surrounding machinery via simple interfaces (sensors, light cabinets, contacts).
Interactive exhibits, however, have other requirements.
Physical Pseudophysics
In contrast to industrial deployment, applications involving corporate and communication design place emphasis on the characteristics with which a robot moves: The robot’s movement should satisfy aesthetic and choreographic criteria to give the impression of an individual personality. This requires precise control of the robot’s movements. At the same time, changes in speed during a part of a journey, different gestures and “tics” should be easy to program.
The Real-Time Robotic Motion Library implements various manners of movement in the form of algorithms in order to influence the aesthetics of the sequences of movements. For example, the robot can execute a journey to the same target in a “slow and subdued" or a “wildly reckless” fashion, without any great programming effort. The RT/RML enables virtual pseudo-physics to be imposed over the real physics of the robot.
Some features are cited here as examples:
- Suspension – physical spring suspension model separately adjustable for rotations and translations
- Rotations around any points
- Bézier curves – movement along a curve defined by two handles
- Tweens – different modes to modulate the speed during a movement
Robot-specific problems, such as working range, axis configuration, maximum rotation and singularities, are avoided by various means. These include the robot reporting errors back to the authoring system, so that the programming work can also be performed by outside programmers without any experience with industrial robots.
Real Time Control
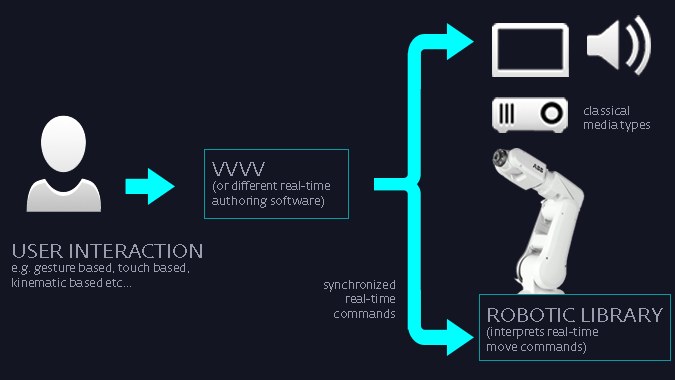
The fact that the robot reacts directly to inputs from the outside is not only a major feature of interactive exhibits, but also makes the work easier during the programming processes. This allows video animations, sound and robot movements to be synchronised, for example. To this end, the robot was equipped with an interactive control system to enable it to react to commands “on the fly”. All commands are sent via TCP/IP, so that the robot can be actuated from any authoring system without problem.
The Real-Time Robotic Motion Library approach regards the robot as a machine without status controlled from the outside by any kind of authoring system, VVVV for example.
The advantage of this approach is that the robot’s movements can be very easily synchronised with content generated from other media, such as displays, projectors or with audio and kinetic elements. In complex, interactive media exhibits, the signals can be simply sent in real time to all the different media, so that these react directly to the interactions. The Real-Time Robotic Motion Library now also enables the movements of an industrial robot to be tied into such choreography.
Do not fear mistakes, there are none (Miles Davis)
A further important difference between industrial and creative robot programming is how errors are handled:
In an industrial environment, the sequences of movements are generally programmed just once and cannot be changed during on-going operations. It is important to systematically analyse every potential error in the industrial programming process. Thus if an error occurs in an industrial robot program, the run is typically aborted with an emergency stop so as to prevent mechanical damage or injuries to people.
If this safety is ensured in some other way, one of the main challenges, particularly during the creative phase of developing a movement, is that the robot attempts to execute the sequences of movements without triggering an emergency stop, insofar as feasible. From an aesthetic viewpoint, it is often irrelevant whether the mathematically specified movement is precisely executed – the look and the flow of the overall movement is more important. The library was supplemented for this reason, for instance with functions which define a virtual working range: the robot moves exactly to positions within the working range, whilst the nearest reachable point is automatically moved to for positions outside the working range.
Examples
Some prototypical examples of RT/RML applications from the MESO laboratory are shown in what follows:
Tweens
As an example of the function of the RT/RML. Just one string is sent by TCP/IP to start the movement. This triggers movement along a Bézier curve with certain tweening parameters.
The following exhibits for BMW were implemented with the library:
BMW ActiveHybrid
Interactive robotic explanation tool at the Beijing Auto Show 2012

BMW M Sculpture
Super-Kamiokande Geodesic Display with a real-time controlled robot in the center for BMW M
BMW Sustainable Materials
This robotic Exhibit displays real material samples with the help of real-time driven microscopes at the robots tool.

BMW xDrive
The idea of this Robotic Exhibit is to create a realistic impression of a high dynamic drive on the display to explain BMW’s xDrive Technology.

Interactive Robotic Presentation Tool
Interactive Robotic Presentation Tool for the ABB Roboteria in Friedberg

Shade of Play
Robotic shadow play – Kinetic light installation for the opening act of the IHK Frankfurt for the Luminale 2012

The MESO-Team: Sebastian Oschatz, David Brüll, Jochen Leinberger, Nikos Mechanezidis, Tebjan Halm, Elias Holzer, Friedrich Söllner, Martin Wagner